






The Idea
8 inch frame was the first thing i was sure of, considering the purpose of the build. that is indoor and outdoor scanning. Keeping forts with lengthy hallways in mind. Figuring out smooth transitioning between GPS and GPS denied environments was the next question. But First Mapping Setup need to be figured out, as Frame and Power Train Requirements are dependent on it. lets Start With that.
Technical Details
- Capabilities: Indoors & Outdoors
- Flight Time: 20 Mins
- Lidar Range: 30 Meters
- Laser Wavalength: 905nm
- RGB Resolution: 4k60fps
- Mapping Accuracy: Sub 2CM
- Output: Coloured Point Cloud & Gaussian Splats
- Firmware: Ardupilot
- Jetson Communication: WIFI
- Cruise Speed: 12m/s
- Weight: 3.2kg
Mapping Setup
Initial Idea was to establish a 2d lidar on a controlled motor, and coordinate IMU from both lidar and on FC to derive 3d position of the lidar source. but soon got into trouble to derive position from multiple sources, and there minute differences causing large difference. As i intended to output a coloured point cloud, Calibrating lidar and RGB is another layer of challenge in this setup. Then i found out about this 3d lidar in affordable range, which is what you see in the final drone. This lidar got inbuilt IMU, which is crucial in working with open source SLAM algorithms. Combining it with a RGB Camera to output coloured point cloud is far straight forward now.
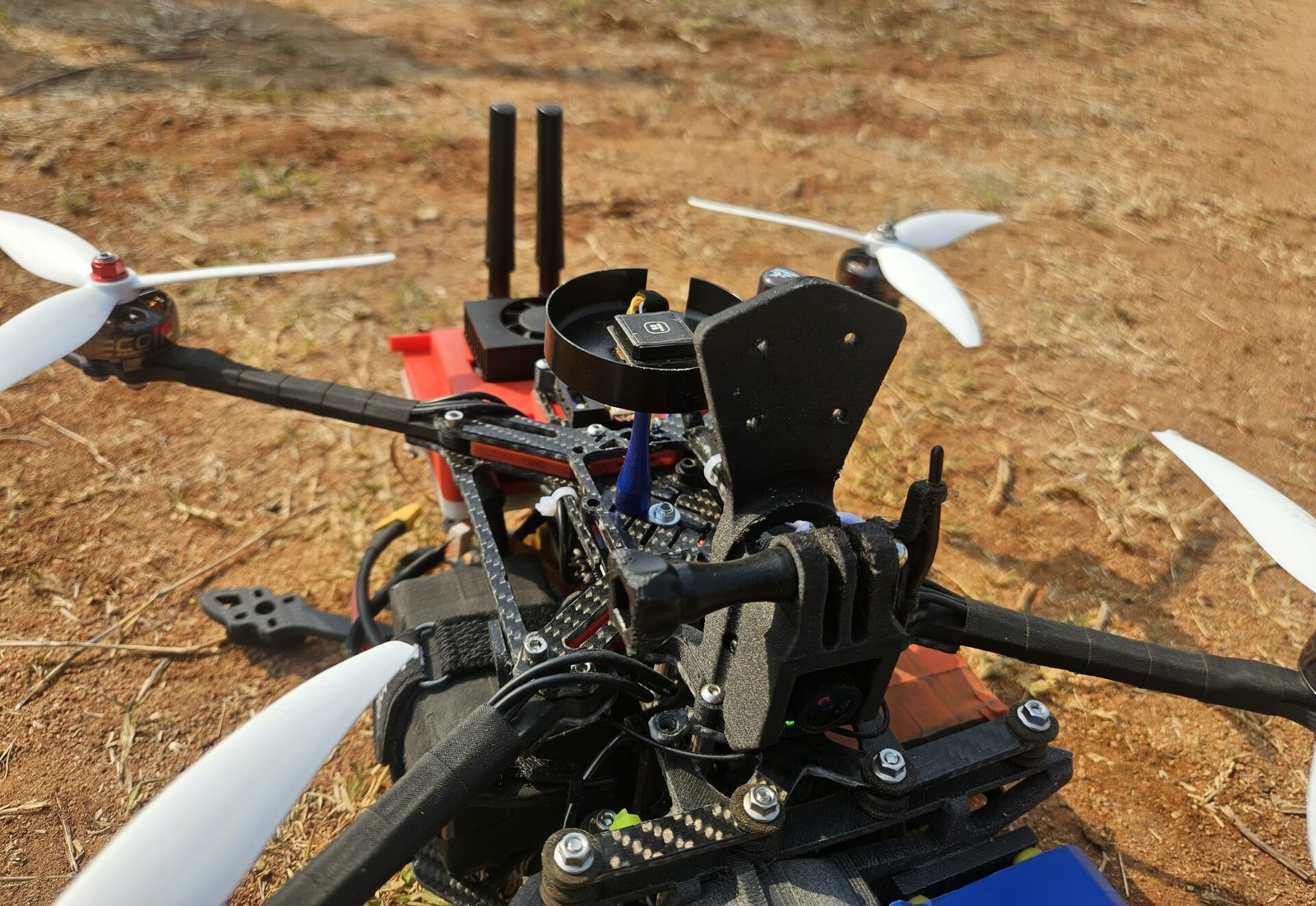
Frame Design
Housing components of various propositions while addressing there needs for effective use. I have resorted to a conventional design, starting from ground up. Learning along the way, the principals of structural design and properties required to make a rigid drone. that with stands pressures of harsh flights in wind. shifting from Blender to fusion 360 made a big difference, grasped quite a bit fluency of Fusion 360 in this process. Collaborated with few of the designer to perfect the mounts.
Heat Dissipation.
Dealing with Heat, turned out to be a way crucial then i expected. Heat from ESC and a capacitor that can handle it, Heat that can compromise efficiency of a component and the neighbours. One need to learn smarter ways to dissipate then sticking a Heatsink on it and how software can help in reducing pressure on hardware. How tightly package systems on DJI or others handle this. Active cooling with fans and passive with prop wash can be utilized.
Spacing Issues
In a compact drone like this with multiple prominent components, while respecting each component requirements to function properly. Space is majority of the issues that were addressed. like enough space between jetson’s WIFI antennas, VTX antenna and radio link antennas. also to not obstruct props down wash, which can affect overall efficiency. Two batteries and buck down converters for mapping setup had to be placed in bottom compartments.
Companion Computer & Communication
Started on Raspberry Pi 5 16gb ram, with Ubuntu as OS, almost finished setting up the data accusation and processing with intended SLAM algorithm. then i figured a budget to buy Jetson Orin Nano Super, hoping it would surpas Ras Pi, in increasing features of this drone. Jetson Comes with computation capabilities need for AI Models. but migrating to jetson was far less straight forward then i expected. That took a while to figure out. I established mavlink connection between FC and Jetson, and a hotspot connection next. so one could have a ground control access to jetson and receive mission critical info. i intend to make a proper use of jetson AI capabilities in future and update hear.